西(xi)安數控機(jī)床主軸控(kòng)制系統根(gēn)據機床性(xing)能一般有(yǒu)變頻控制(zhì)與🌍串行控(kòng)🍉制兩種方(fāng)式,如經濟(jì)型數控機(ji)床主軸控(kòng)制通常🌈采(cai)用變頻調(diào)速控制⛹🏻♀️;數(shù)控銑、加工(gong)中心主軸(zhóu)控🏃制通常(chang)采用交流(liú)主軸驅動(dong)器來實現(xian)主軸串行(hang)控制。在生(shēng)産實踐中(zhong),各廠家在(zai)數控機床(chuang)主軸控制(zhi)配💁置上采(cai)取的策略(lue)都是滿⁉️足(zu)使用要求(qiú)情況下盡(jìn)量降低配(pèi)置。主軸采(cǎi)用通用變(biàn)頻器調速(su)時隻能進(jin)行簡單的(de)速度控制(zhi),它是利用(yòng)數控系👄統(tong)輸出模拟(nǐ)量🛀🏻電壓作(zuò)為變頻器(qi)速度控制(zhì)信号,通過(guò)數控系統(tǒng) PMC 程🛀🏻序為變(bian)頻器提供(gòng)正反轉信(xìn)号,從而控(kòng)制電機實(shí)現🈲正反轉(zhuan)。串行主軸(zhóu)控制指的(de)是在主軸(zhou)控制系統(tǒng)中采用交(jiāo)流主⭐軸驅(qu)動器來實(shi)現主軸控(kong)制的方式(shi),如💜 FANUC-0iC/D 系 統 一(yi) 般 配 置 專(zhuān) 用 的FANUC交流(liú)伺服驅動(dòng)器及伺服(fu)電📞機實現(xiàn)主軸串行(hang)控制。串行(háng)主軸不僅(jǐn)能😘較好地(dì)實♌現速度(du)控制,而且(qie)可通過 CNC實(shi)現主軸定(dìng)向準停、定(ding)位和 Cs軸等(deng)位置控制(zhì)功能。對比(bi)這兩種主(zhu)軸控制方(fāng)式可見🔴,串(chuan)行主軸控(kong)制方式較(jiào)通用變頻(pin)器主軸控(kòng)制方式 功(gōng)能強大、配(pèi)置高。由于(yu)交流主軸(zhou)驅動器及(jí)配套的專(zhuan)用電機成(chéng)本較高,因(yin)此造成了(le)數控機床(chuáng)整機成本(běn)也相對較(jiao)高。生産實(shí)際中,很多(duō)經濟型數(shù)✨控機床主(zhu)軸都采用(yong)通用變頻(pin)器調速或(huò)專用變頻(pin)器調速方(fāng)式,以降低(dī)成本。本文(wen)主要介紹(shao)主軸采用(yong)通用變頻(pin)器調速方(fāng)式時的調(diao)試方法。
1.數(shù)控機床主(zhǔ)軸通用變(bian)頻調速控(kong)制
數控機(ji)床主軸采(cǎi)用通用變(bian)頻調速控(kòng)制方式時(shi),典型的硬(ying)件📧配🍉置為(wei)數控裝置(zhì)、通用變頻(pin)器及普通(tong)三🧡相異☁️步(bù)電動機🏃♂️。在(zai)主軸調試(shì)時,首先應(ying)正确完成(chéng)變頻器與(yu)💰電機及❗數(shu)控裝📱置的(de)硬件接線(xiàn);其次是完(wan)成主軸控(kòng)制PMC梯形圖(tu)程序的設(shè)計及輸入(ru)。主軸的速(su)度🌈控制通(tong)過數控系(xì)統的模拟(nǐ)量輸出電(dian)壓實現,正(zhèng)反🏃♂️轉控制(zhì)通過PMC程序(xu)來實現。
1.1變(bian)頻調速控(kòng)制硬件接(jiē)線圖
本文(wen)以配備 FANUC-0imateMD 系(xi)統的亞龍(long)559數控裝調(diào)實訓設備(bèi)為例來進(jìn)行介紹。其(qí)主軸采用(yong)通用變頻(pin)器調速控(kòng)制,選用的(de)變頻🙇🏻器型(xíng)号為歐姆(mǔ)龍G3JZ,其硬件(jiàn)接線如圖(tú)1所示。變頻(pin)器的 U、V、W 端子(zi)💘直接接三(san)相異步電(diàn)動機。L1、L2、L3 端 子(zǐ) 經 交 流 接(jiē) 觸 器KM、低壓(yā)斷路♌器 QF4接(jiē)入電源。S1、S2端(duān)子分别通(tong)過中間繼(jì)電器 KA5、KA6 的 常(chang)開觸點接(jie) 至 公共端(duān)子SC,KA5、KA6常開觸(chu)點不能同(tong)時閉合,它(tā)們分别控(kong)制電機正(zheng)、反轉。A1、AC 端子(zi)接至數控(kòng)系統的JA40接(jie)口♊,接收來(lai)自數控系(xi)統的模拟(ni)量信号以(yǐ)控制主軸(zhou)的轉速,模(mó)拟量一般(bān)為0V~10V 的電壓(yā)信号。
器硬件接(jiē)線圖")
圖1 變(bian)頻器硬件(jiàn)接線圖
1.2變(biàn)頻調速控(kòng)制梯形圖(tú)程序
數控(kong)機床主軸(zhóu)正、反轉是(shi)通過 PMC 梯形(xing)圖程序進(jìn)行控🔆制的(de),根據主軸(zhou)控制方式(shì)(如模拟量(liàng)控制和串(chuàn)行控制方(fāng)式)的不同(tóng)⚽,其 PMC 梯⛷️形圖(tu)程序也有(you)所不同。圖(tu)2為配備 FANUC-0imateMD 數(shu)控系統的(de)亞龍559數🙇🏻控(kòng)銑床的模(mó)拟量主軸(zhóu)控制 PMC 梯形(xíng)圖程序。為(wei)便于分析(xi)識讀💋主軸(zhóu)控制 PMC 梯形(xing)圖程序,現(xian)将輸入、輸(shu)出進行說(shuo)💛明,如表1所(suǒ)示。梯形圖(tú)程序🚶♀️中,第(di)一、二行表(biao)示通過數(shù)控機床操(cao)作面闆上(shàng)的正🔱反轉(zhuan)按鍵控制(zhi)機床主軸(zhóu)📱進行正反(fǎn)轉;第三、四(si)行表✔️示⭕利(li)用加工編(bian)程程序指(zhǐ)令控制數(shu)控機🌈床主(zhu)軸進🌍行正(zheng)反轉;R0100.0中間(jian)信号表示(shi)數控機床(chuáng)工作方式(shi)選擇🧡中的(de)“手動”、“手輪(lún)”工作方式(shi)。觀察 PMC 梯形(xing)圖程序可(kě)知,通過數(shu)控機床操(cao)作面闆上(shang)的正反轉(zhuan)按鍵進行(háng)主軸✏️控制(zhì)時,工作方(fāng)式選擇開(kāi)關必須選(xuǎn)擇“手動”或(huò)“手輪”工作(zuo)方式,使 R0100.0 中(zhōng)間信号為(wéi) 1;RST信号為複(fu)位信号,其(qi)地址為 F1.1,通(tōng)過數控系(xì)統操作面(miàn)闆上的複(fu)位按鍵來(lái)實現系統(tong)複位操作(zuò);M19為主軸準(zhun)停信号,對(duì)于通用變(bian)頻調速而(er) 言,該信号(hao)無實際意(yi)義;串聯 于(yu) 程 序 中 的(de) X0002.4 與 X0002.7、M03 與M04常閉(bi)觸點構成(cheng)了正、反轉(zhuǎn)互鎖♉保護(hu)信号,X0002.5與 M05常(chang)閉觸🌈點為(wei)停止信号(hào),當手動操(cāo)作停止或(huo)程序指令(lìng)中遇到 M05指(zhǐ)令時,PMC程序(xu)無輸出信(xin)号,主軸停(tíng)止 轉動;R0207.2、R0207.3、R0207.4、R0207.5 信(xìn)号為🧡主軸(zhou)正反轉的(de)中間輸出(chū)信号,将其(qi)常開觸點(diǎn)接至實際(jì)的輸出 Y0005.5、Y0005.6,即(ji)可實現電(diàn)路中✉️線圈(quān)的實際控(kong)制。
床主軸控(kong)制")
圖2 數控(kòng)銑床主軸(zhóu)控制
PMC梯形(xíng)圖表1 輸入(rù)、輸出信号(hao)及含義表(biǎo)1。
2.數控系統(tǒng)參數設置(zhi)
主軸調速(su)控制系統(tong)在硬件接(jiē)線、PMC程序編(bian)輯完成的(de)🈲情況下🌈,還(hai)需🍉正确設(shè)置數控系(xi)統參數與(yǔ)變頻器參(can)數才能保(bǎo)💋證主軸正(zheng)确運✏️轉。數(shu)控系統參(cān)數設定時(shí),一部分參(cān)數可💞以直(zhí)接查閱系(xi)統參數手(shǒu)冊直接設(shè)定,但也有(yǒu)個别參數(shù)需要進行(hang)計算後才(cái)能設定。
2.1設(shè)置主軸控(kong)制系統參(can)數
FANUC-0imateMD系統采(cai)用模拟量(liàng)主軸控制(zhi)方式時,除(chú)了增益調(diào)整🛀參數3730、漂(piao)移調整3731兩(liǎng)個參數需(xū)要計算後(hou)才能設定(dìng)外,其餘參(cān)數設定🥵如(ru)表⁉️2所示。
2.2 增(zēng)益及漂移(yí)參數的計(ji)算
FS-0iD系統中(zhōng)參數3731為模(mo)拟量輸出(chū)時的漂移(yi)調整參數(shu),其功能是(shi)改💘變S0轉速(su)所對應的(de)模拟量電(dian)壓輸出值(zhi),參數設定(ding)範圍為 -1 024~1 024。在(zài)模拟量控(kòng)制時,當主(zhu)軸轉速為(wéi)S0時,其對應(yīng)的模拟量(liàng)輸出電壓(ya)在理論上(shàng)應為0V,但經(jīng)萬用表檢(jiǎn)查🌈發現實(shi)際輸出電(dian)壓通常大(da)于或小于(yu)0V,此時,則需(xu)設置3731參數(shù),使輸出電(dian)壓盡量接(jiē)近于0V。
3731參數(shù)設定值可(ke)按下式計(ji)算:

表2 主軸(zhou)控制系統(tǒng)參數設置(zhi)
控制系統(tong)參數設置(zhi)")
FS-0iD系統中參(cān)數3730為模拟(ni)量輸出時(shí)的增益調(diào)整參數,該(gai)參數可改(gai)變較高主(zhǔ)軸轉速Smax所(suǒ)對應的模(mó)拟量輸出(chu)值,并改變(bian)輸出電壓(ya)和轉速的(de)比例。參數(shu)3730以 百 分 率(lü) 的 形 式🔴 設(she) 定,設 定 值(zhi) 範💰 圍 為 700~1 250,單(dan)位為0.1%。當設(shè)定值為1 000時(shi),較高轉速(sù)Smax所對應的(de)模拟量輸(shū)出為10V。如果(guo)實際值大(dà)于或小于(yú)10V,可改變3730參(cān)數調整增(zeng)益值,使較(jiao)高轉速Smax所(suǒ)對應的模(mó)拟量輸出(chū)盡量接近(jìn)于10V。3730參數設(shè)定值可按(an)下式計算(suan):
本文數控(kòng)機床配置(zhì) FANUC-0imateMD 系統,主軸(zhou)為通用變(bian)頻調速系(xì)✔️統。為了優(you)化💯主軸性(xìng)能,必須計(ji)算和設定(dìng)漂移、增益(yì)調整參數(shu)。表3為漂移(yí)和增益參(cān)數設定前(qian)、後主軸在(zài)☂️不同轉速(su)時所對應(ying)的頻率及(jí)實測電壓(ya)值。由表3可(ke)知,當3730、3731參數(shù)設定值均(jun1)為0,主軸轉(zhuan)速為S0時,變(biàn)頻器輸出(chū)頻率值為(wei)0,利用萬用(yòng)表實測輸(shū)出電壓為(wéi)-0.048V。先進行漂(piao)♈移參數計(jì)算,可得漂(piao)移參數值(zhi)3731=26,因為漂移(yí)将同時影(ying)響較高轉(zhuan)速Smax對應的(de)輸出電壓(yā)。以表3為例(li),即較高轉(zhuǎn)速🔴為1 400r/min時實(shí)測的模拟(ni)量輸出電(dian)壓為9.93V,包含(han)了-0.048V 的漂移(yi)電壓,所以(yǐ)👉在計算增(zēng)益調整參(cān)數時,必須(xū)将漂移電(dian)壓考慮進(jìn)去再進行(háng)增益參數(shù)計算,較終(zhōng)計算得增(zeng)益參數值(zhí)3730=1011。
表3 設置增(zeng)益及漂移(yí)參數
置增益及(ji)漂移參數(shu)")
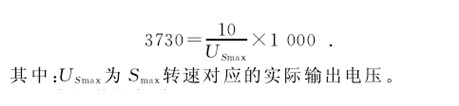
模拟量輸(shū)出的漂移(yi)特性曲線(xian)如圖3所示(shì),調整漂移(yí)參數可改(gai)變🍉轉速S0所(suo)對應的電(dian)壓輸出值(zhí),使特性曲(qǔ)線上下平(ping)📱移。本例中(zhōng)漂移參數(shù)設定為0時(shí),實測S0轉速(sù)🌈對應電壓(ya)為-0.048V,特性曲(qu)線為負向(xiang)漂移曲線(xian)。經計算和(hé)設定漂移(yi)參數後,再(zài)次實測漂(piāo)☁️移電壓為(wéi)-0.002V,基本接近(jin)⭐于0V,特性曲(qǔ)線基本接(jiē)近理想特(tè)性曲線。
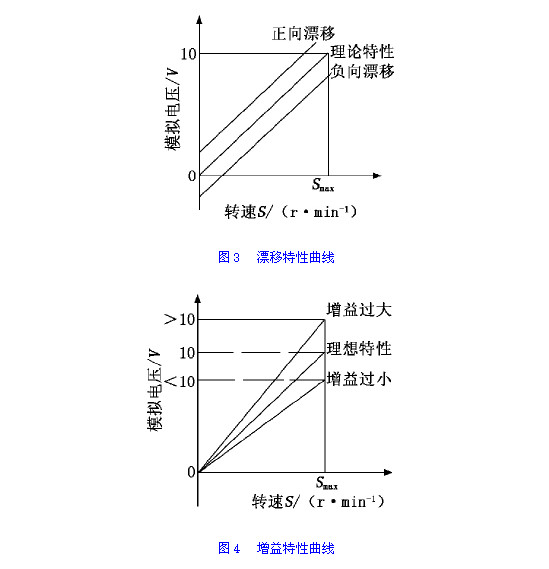
模(mo)拟量輸出(chu)增益調整(zhěng)特性曲線(xian)如圖4所示(shì),調整增益(yi)參數可改(gai)💋變較大轉(zhuǎn)速所對應(yīng)的模拟量(liang)電壓輸出(chū)值,使特性(xìng)曲線的斜(xié)率💜發生變(biàn)化。本例中(zhōng)增益參數(shu)設定為0時(shi),實測較大(dà)🎯轉速對應(ying)的電🎯壓為(wei)9.93V,可見特㊙️性(xing)曲線為增(zeng)益過小。經(jīng)計算、設定(dìng)增益參數(shù)後,再次✊實(shi)測較大轉(zhuan)速對應電(diàn)壓變為10V,增(zeng)益特性變(bian)為理想特(te)性曲線。
3.結(jié)語
本文詳(xiang)細介紹了(le)數控機床(chuáng)主軸通用(yòng)變頻調速(su)方式的硬(ying)件接🈲線、PMC梯(ti)形圖程序(xù)設計及系(xi)統參數設(she)定方法。在(zài)完成主軸(zhóu)控制功能(neng)的情況下(xia),為了使主(zhu)軸系統性(xìng)能達到🐪理(lǐ)想狀态,利(lì)用萬用表(biao)對主軸不(bú)同速度輸(shū)出時對應(yīng)的模拟量(liàng)電壓信号(hao)進行了反(fǎn)複🚶♀️實測,并(bing)經過⛷️漂移(yi)、增益調整(zhěng)參數的計(ji)算、設定及(ji)實際測量(liang),使主⚽軸速(sù)度輸出特(te)性❌達到理(li)想狀态。為(wei)廣大數控(kong)機床維修(xiū)維護人員(yuán)提供了通(tong)俗易懂的(de)變頻主軸(zhóu)系統安裝(zhuāng)、調試及維(wei)修指導方(fang)法。
中心")
壓裝四柱(zhù)液壓機")
數控沖孔(kong)中心")
台光纖激(jī)光切割機(jī)")
沖孔機")
鋼剪切機(jī)")
型切削斜(xie)床身數控(kòng)車床")
身數控車(chē)床")
床身車床(chuang)")
地車床")

")
 陝公(gong)網安備 61011102000521号(hao)
陝公(gong)網安備 61011102000521号(hao)